Режим воздух - воздух (А-А).
Добавлено: 13 апр 2026, 16:46
Линия визирования TGP автоматически согласовывается с линией направления луча радара, когда выбран основной режим A-A, и радар отслеживает цель. Если радар не отслеживает воздушную цель, модуль направляет линию визирования TGP прямо по курсу, на угол 3 градуса.
Вы можете убрать прицел TGP с помощью переключателя CURSOR на РУД. При повороте камера TGP перемещается в пространстве стабилизированным образом. В этом подвижном режиме, но без отслеживания цели, на дисплее отображается «RATES». После отключения перекрестие уменьшится до половины.
Если воздушная цель проходит в узкой зоне поля зрения (представленной четырьмя угловыми маркерами), TGP попытается отследить цель и поставить крестик «+» на ней. Если цель вылетит за пределы узкого поля зрения, крест исчезнет.
Если затем вы введете команду TMS вверх коротко (захват командной точки), цель будет центрирована в перекрестии, и вокруг цели будет нарисован прямоугольник, соответствующий его размеру. В этом режиме будет отображаться «POINT», а также перекрестный трекинг. Чтобы выйти из трека POINT, пользователь может подать команду INR track и вернуться в режим RATES.
На экране отображаются следующие элементы:
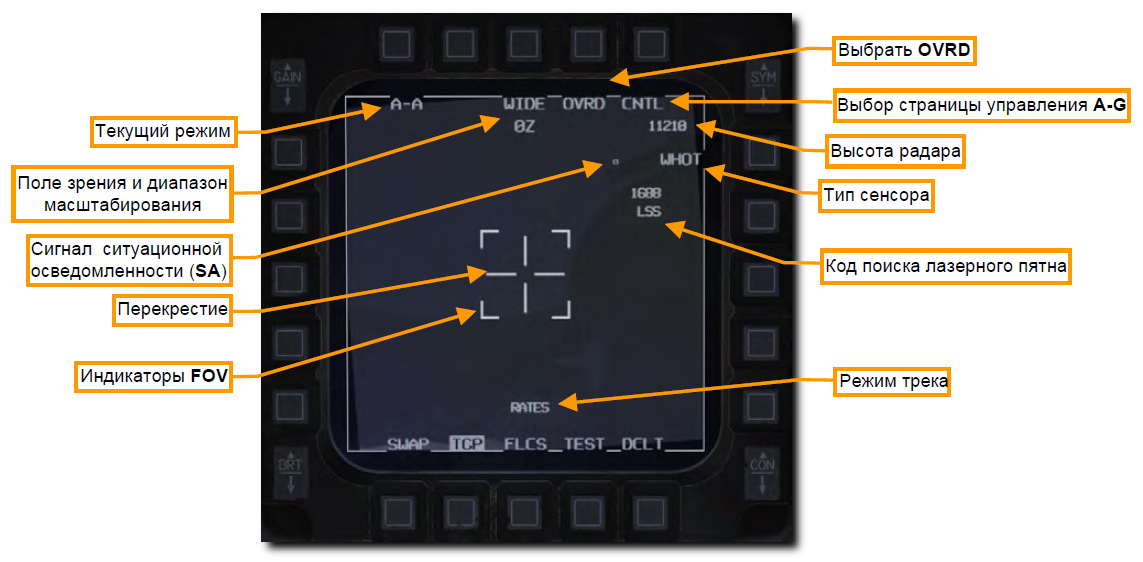
Текущий режим. Это тот режим, в котором сейчас находится TGP.
Поле зрения. Нажатие этой OSB3 переключает между узким полем зрения (NFOV) или широким полем зрения (WFOV). Эти виды могут различаться между датчиками CCD и FLIR в TGP.
•FLIR поле зрения:
* Широкое поле зрения (WFOV) составляет 4 х 4 градуса.
* Узкое поле зрения (NFOV) составляет 1 x 1 градус.
•CCD поле зрения:
* Широкое поле зрения (WFOV) составляет 3,5 х 3,5 градуса.
* Узкое поле зрения (NFOV) составляет 1 х 1 градус.
Диапазон масштабирования. В пределах выбора FOV вы можете дополнительно отрегулировать коэффициент увеличения, увеличивая и уменьшая масштаб с помощью ручки RANGE на РУД. Диапазон масштабирования изменяется от 0Z (без увеличения) до 9Z (самый высокий уровень увеличения в поле зрения). Объекты в поле зрения TGP увеличиваются вдвое от 0 до 9.
Перекрестие. Линии прицеливания для прицела и лазерного подсвета.
Индикаторы поля зрения (FOV). Эти четыре угловые скобки отображаются только при включенном WIDE FOV и указывают часть изображения, которая будет отображаться, если включен NARO FOV.
Выбрать OVRD. Нажатие этой OSB отменяет любой текущий режим и возвращает в STBY. Когда OVRD выбирается во второй раз, возвращается последний выбранный режим.
Выбор страницы управления A-G. При нажатии этой OSB5 выбирается страница управления STBY.
Высота радара. Отображается текущая высота радара.
Тип сенсора. В этом текстовом поле, отображаемом в верхнем правом углу, отображается текущий режим видео, в котором находится TGP.
Три варианта режима:
•WHOT. При использовании камеры FLIR горячие объекты кажутся светлее, чем холодный фон.
•BHOT. При использовании камеры FLIR горячие объекты кажутся темнее, чем холодный фон.
•TV. Дневная телевизионная оптико-электронная камера (CCD).
Код поиска лазерного пятна. Это код частоты лазерных импульсов (PRF), который TGP будет пытаться определить в режиме поиска лазерного пятна (LSS).
Режим трека. Если TGP находится в режиме трека, в этом поле будет указан режим трека, в котором он находится.
Типы включают:
•RATES. Когда в режиме A-A функция движения отключена, TGP автоматически войдет(указывается в поле типа трекинга) в режим RATES.
•POINT. Как и в режиме A-G, пользователь может управлять движением точки захвата надобъектом. Этот режим также используется для радиолокационных целей.
Сигнал ситуационной осведомленности (SA). Сигнал SA предоставляет маркер (квадрат), указывающий текущую линию визирования TGP относительно продольной оси контейнера, которая совпадает с продольной осью самолета. Маркер (представлен в виде небольшого квадрата), может перемещаться в любое место на дисплее. Положение маркера SA представляет текущую линию видимости TGP.
Вы можете убрать прицел TGP с помощью переключателя CURSOR на РУД. При повороте камера TGP перемещается в пространстве стабилизированным образом. В этом подвижном режиме, но без отслеживания цели, на дисплее отображается «RATES». После отключения перекрестие уменьшится до половины.
Если воздушная цель проходит в узкой зоне поля зрения (представленной четырьмя угловыми маркерами), TGP попытается отследить цель и поставить крестик «+» на ней. Если цель вылетит за пределы узкого поля зрения, крест исчезнет.
Если затем вы введете команду TMS вверх коротко (захват командной точки), цель будет центрирована в перекрестии, и вокруг цели будет нарисован прямоугольник, соответствующий его размеру. В этом режиме будет отображаться «POINT», а также перекрестный трекинг. Чтобы выйти из трека POINT, пользователь может подать команду INR track и вернуться в режим RATES.
На экране отображаются следующие элементы:
Текущий режим. Это тот режим, в котором сейчас находится TGP.
Поле зрения. Нажатие этой OSB3 переключает между узким полем зрения (NFOV) или широким полем зрения (WFOV). Эти виды могут различаться между датчиками CCD и FLIR в TGP.
•FLIR поле зрения:
* Широкое поле зрения (WFOV) составляет 4 х 4 градуса.
* Узкое поле зрения (NFOV) составляет 1 x 1 градус.
•CCD поле зрения:
* Широкое поле зрения (WFOV) составляет 3,5 х 3,5 градуса.
* Узкое поле зрения (NFOV) составляет 1 х 1 градус.
Диапазон масштабирования. В пределах выбора FOV вы можете дополнительно отрегулировать коэффициент увеличения, увеличивая и уменьшая масштаб с помощью ручки RANGE на РУД. Диапазон масштабирования изменяется от 0Z (без увеличения) до 9Z (самый высокий уровень увеличения в поле зрения). Объекты в поле зрения TGP увеличиваются вдвое от 0 до 9.
Перекрестие. Линии прицеливания для прицела и лазерного подсвета.
Индикаторы поля зрения (FOV). Эти четыре угловые скобки отображаются только при включенном WIDE FOV и указывают часть изображения, которая будет отображаться, если включен NARO FOV.
Выбрать OVRD. Нажатие этой OSB отменяет любой текущий режим и возвращает в STBY. Когда OVRD выбирается во второй раз, возвращается последний выбранный режим.
Выбор страницы управления A-G. При нажатии этой OSB5 выбирается страница управления STBY.
Высота радара. Отображается текущая высота радара.
Тип сенсора. В этом текстовом поле, отображаемом в верхнем правом углу, отображается текущий режим видео, в котором находится TGP.
Три варианта режима:
•WHOT. При использовании камеры FLIR горячие объекты кажутся светлее, чем холодный фон.
•BHOT. При использовании камеры FLIR горячие объекты кажутся темнее, чем холодный фон.
•TV. Дневная телевизионная оптико-электронная камера (CCD).
Код поиска лазерного пятна. Это код частоты лазерных импульсов (PRF), который TGP будет пытаться определить в режиме поиска лазерного пятна (LSS).
Режим трека. Если TGP находится в режиме трека, в этом поле будет указан режим трека, в котором он находится.
Типы включают:
•RATES. Когда в режиме A-A функция движения отключена, TGP автоматически войдет(указывается в поле типа трекинга) в режим RATES.
•POINT. Как и в режиме A-G, пользователь может управлять движением точки захвата надобъектом. Этот режим также используется для радиолокационных целей.
Сигнал ситуационной осведомленности (SA). Сигнал SA предоставляет маркер (квадрат), указывающий текущую линию визирования TGP относительно продольной оси контейнера, которая совпадает с продольной осью самолета. Маркер (представлен в виде небольшого квадрата), может перемещаться в любое место на дисплее. Положение маркера SA представляет текущую линию видимости TGP.