

Цели могут быть обнаружены, отслежены и захвачены двумя способами:
SAM - Отслеживание в режиме ситуационной осведомленности.
STT - Отслеживание одной цели в захвате.
1). Отслеживание в режиме ситуационной осведомленности (SAM). Обнаружение и захват цели инициируются путем наведения курсора захвата на цель, однократного нажатия TMS «вверх» на РУС и затем отпускания TMS. Это включит режим SAM.
Во время захвата антенна направлена на последнюю известную позицию цели, и выполняется поиск лучом в 4 полосы ±10 градусов.
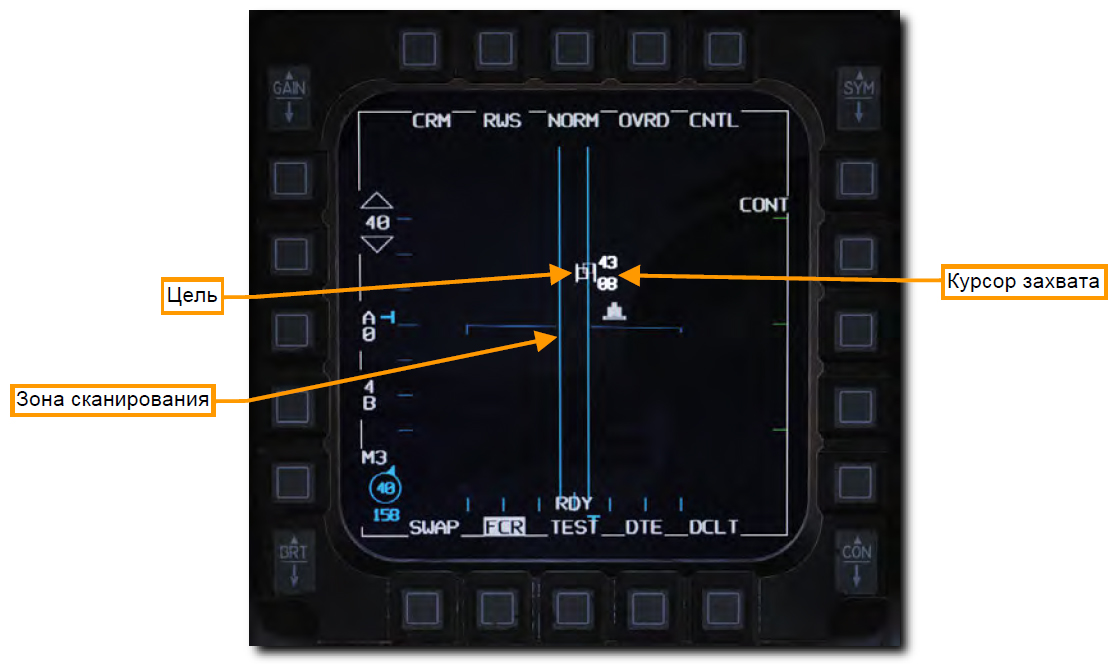
Поиск в зоне сканирования.
Если цель не находится под курсором захвата, когда TMS нажата вперед или цель не обнаружена, охват сканирования возвращается к предыдущему шаблону сканирования.
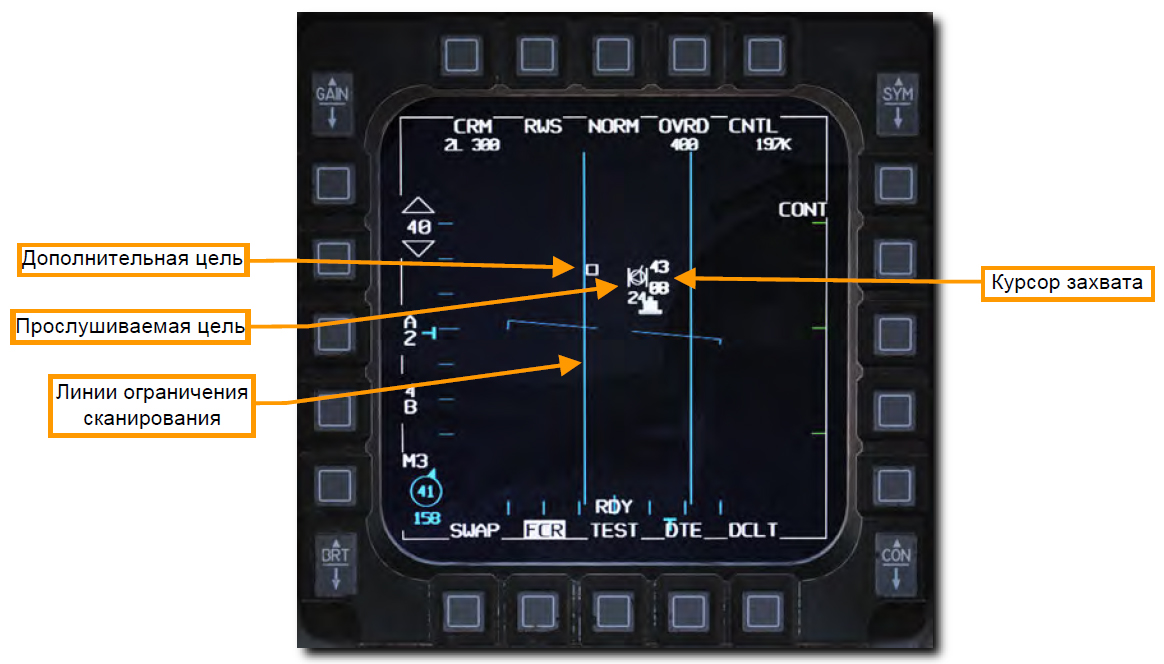
После успешного захвата включается режим SAM. Цель отслеживается, но радар продолжает сканировать область и отображать дополнительные цели. Это обычно называется «обозначением» или «прослушиванием» цели.
AIM-120 AMRAAM можно применять по «прослушиваемой» цели даже без захвата STT.
Режим ситуационной осведомленности (SAM).
Из режима SAM можно выйти, удерживая ручку TMS вниз.
Перемещение TMS вверх с курсором захвата над целью SAM входит в режим слежения за одной целью (STT).
Функции HOTAS TMS в режиме радара RWS и радара в качестве SOI:
• С курсором захвата над целью TMS вверх из RWS переводит радар в режиме SAM.
• С курсором захвата над целью TMS вверх из SAM переводит радар в режим STT.
• TMS вниз возвращает радар в режим SAM со сбросом с цели.
• TMS двойное вниз возвращает радар в режим RWS со сбросом с цели.
• TMS влево режим IFF М4 - «Scan».
• TMS влево-долгое режим М4 IFF - «LOS» (опрос по линии азимута).
2). Отслеживание одной цели в захвате (STT). Обнаружение и захват цели инициируются путем помещения курсора захвата над целью, дважды в быстрой последовательности TMS вверх и последующего отпускания TMS.
Последовательность сбора данных такая же, как указано выше, за исключением того, что отслеживается только одна цель. Радар теперь фокусирует всю свою энергию на одной цели и обеспечивает постоянные обновления. Однако радар больше не будет обнаруживать другие контакты, и противник может быть предупрежден этим радарным захватом.

Отслеживание одной цели в захвате (STT).
Из режима STT можно выйти с помощью TMS вниз на РУС. TMS вниз один раз возвращает в режим SAM с прослушиванием цели. TMS вниз дважды возвращается в режим RWS.
Этот режим обсуждается в разделе Single Target Track (STT) ниже.
Функции HOTAS TMS в режиме радара STT и радара в качестве SOI:
• Режим STT может быть отключен TMS вниз.
• TMS вниз один раз, радар возвращается в режим SAM со сбросом цели.
• TMS вниз дважды возвращает радар в режим RWS.









