

В четырех различных подрежимах доступны различные шаблоны сканирования:
•Прицел (BORE).
•10°x 60° (Vertical Scan) - Вертикальное сканирование.
•30°x 20° (HUD Scan) - Сканирование зоны ИЛС.
•Поворотный (Slewable).
Радар захватывает первую цель, которую он обнаруживает в рамках поисковой схемы каждого подрежима. Максимальная дальность обнаружения составляет 10 морских миль для всех подрежимов ACM, кроме BORE, где возможно обнаружение до 20 морских миль. У каждого подрежима есть свои сильные и слабые стороны, и его лучше всего использовать в разных ситуациях.
ACM может быть включен двумя способами:
1.Установите переключатель Dogfight/Missile на РУД в положение DGFT. При этом автоматическивыбирается ACM.
2.Нажмите OSB рядом с режимом радара и выберите ACM из опций в левой части экрана.
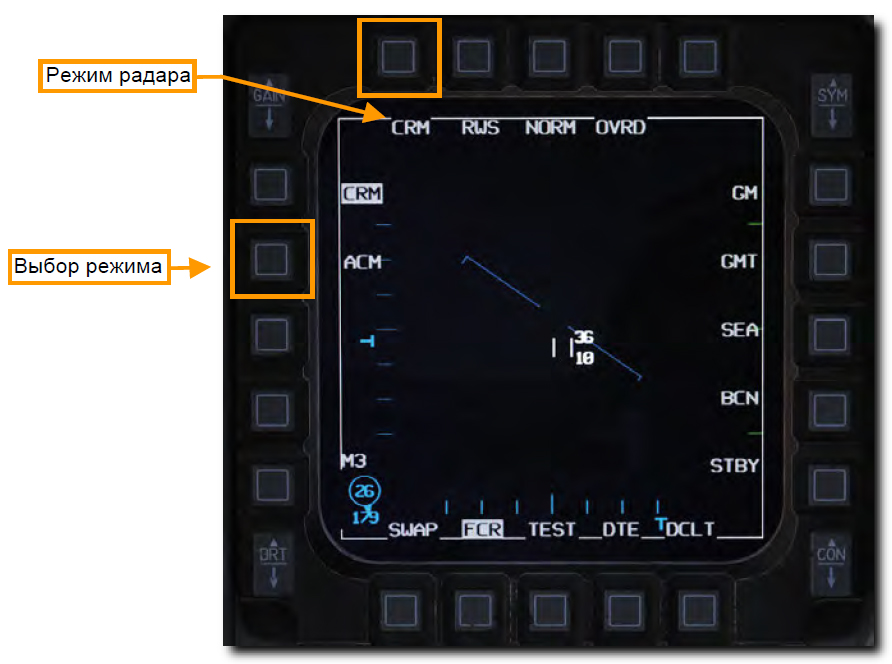
Выбор режима радара ACM.
Подрежим 30°x 20° сканирование зоны ИЛС, входит в неизлучающее состояние (NO RAD) по умолчанию, когда выбран режим ACM. Радар активируется, когда подрежим выбирается либо циклически переключаясь между подрежимами на MFD OSB2, либо с помощью переключателя TMS вправо на РУС.
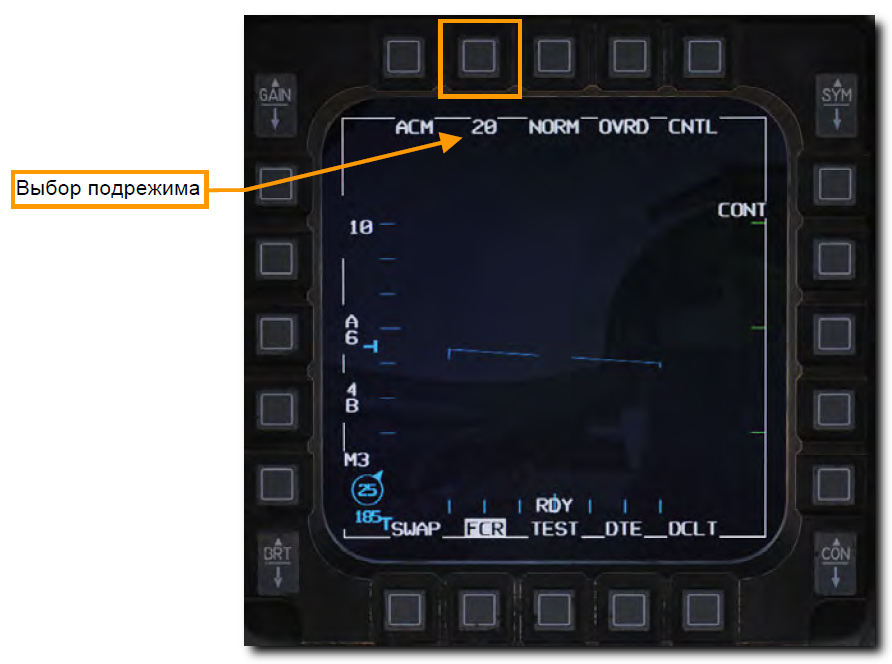
Выбор подрежима радара ACM.
Функции HOTAS TMS в режиме радара ACM и радара в качестве SOI:

•TMS вверхoBoresight (BORE) подрежим.
•TMS внизoБез захвата цели: 10°x 60° (вертикальное сканирование)oС захватом цели: Цель сброшена и 30°x 20° (сканирование ИЛС) NO RAD.
•TMS вправоo30°x 20° (сканирование ИЛС).
•TMS влевоoРежим IFF М4 - «Scan», «влево-долгое» режим IFF М4 - «LOS».









